Wireless particle and ozone warning system
Part of the series University projects (0 posts total).My second project at Aalborg University was focused mostly on learning the human side of engineering. Talking to (potential) users, establishing their needs and conflicting interests from several actors. Contrary to the previous project we had to find a real life problem and work towards solving it.
The problem
In particular, a growing problem in cities worldwide is the increasing amount of local ozone and particulate matter, which when breathed pose a non-significant health risk. The European Union decrees a limit why most EU countries profile the air quality through multiple air quality measurement stations. This project investigates how the air quality is measured, what is measured and who does it. Afterwards, a wireless air quality station is constructed.
Research shows that EU has directives for ozone, PM2.5 and PM10 concentration. PM stands for particulate matter and indicates any particle less than 2.5 µm and 10 µm respectively (human hair has a width of about 50 µm). The Danish Centre for Environment and Energy (DCE) are responsible for measuring the concentrations of these and sustained by about 10 air quality measurement stations dispersed throughout Denmark. The air quality not covered by these stations are modelled from the measurements. The project establishes that a small mobile wireless air quality measurement system can aid in ensuring the EU limits in areas covered by the model, since the model cannot possible know sudden and local changes.
The system
The following requirements were established:
- Must be able to sense ozone and PM2.5 concentration
- Must raise an alarm if limits are exceeded
- Must be wireless and battery-driven
- Should use GPS to establish its position
- Should log the sensor values locally
- Must Withstand Danish wind and weather
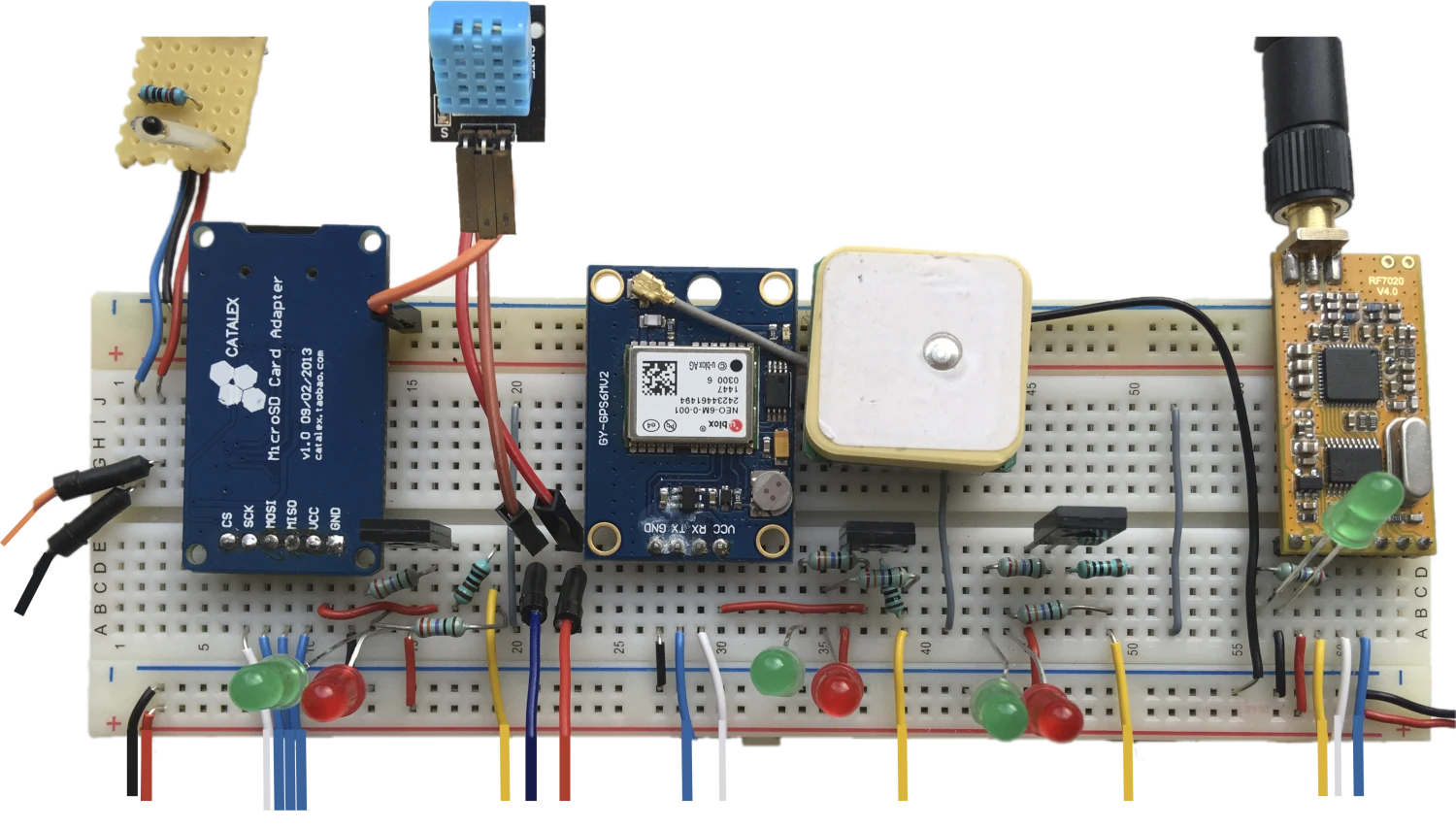
A breadboard of all the electronics of this project barring the particle sensor and microprocessor.
The small yellow perfboard is a thermal resistor and ordinary resistor in a voltage divider. It is used to calculate the temperature. The large blue component on the left side of the breadboard is a micro SD card adapter for logging sensor values (point 5). The adapter communicates over SPI. The light blue box is a humidity sensor. It produces an voltage between ground and supply voltage for humidity levels 0 - 100%. The blue component in the middle is the GPS (point 4) alongside its antenna (white box). The yellow component on the right is an APC220 USB to serial wireless module. It is used to interface wirelessly with a USB adapter in a laptop. Both the GPS and the antenna communicate via UART. The LED’s are for alarming and give a quick reading if limits are exceeded (point 2) or if the program encounters an error. The program is run on an Arduino UNO microprocessor (not pictured) to which the a PM2.5 sensor is also connected. The Arduino is also connected to an external real-time clock for keeping accurate time.
In total, 5 components with different communication schemes must be polled at reasonable intervals while checking if limits are exceeded.
Power saving
Some of the components use a lot of power (looking at you, GPS uBlox NEO-6M). Since the station need not be turned on very often, the sensors can be turned off to save power. This is the purpose of the mounted transistors (black squares on the breadboard). Furthermore, the voltage was reduced as low as possible to reduce power consumption due to internal resistances. For each major component, a test was made to establish the minimum voltage at which it still operates, and what the start-up time is. Particularly the GPS can be slow to establish decent signal to more than one satellite (needed for position triangulation) up to 10 minutes.
GPS uncertainty
We also tested the GPS uncertainty by mounting the station outside a window for 12 hours.

The particle warning system mounted outside a window on top of some planks of wood.
The results were interesting…
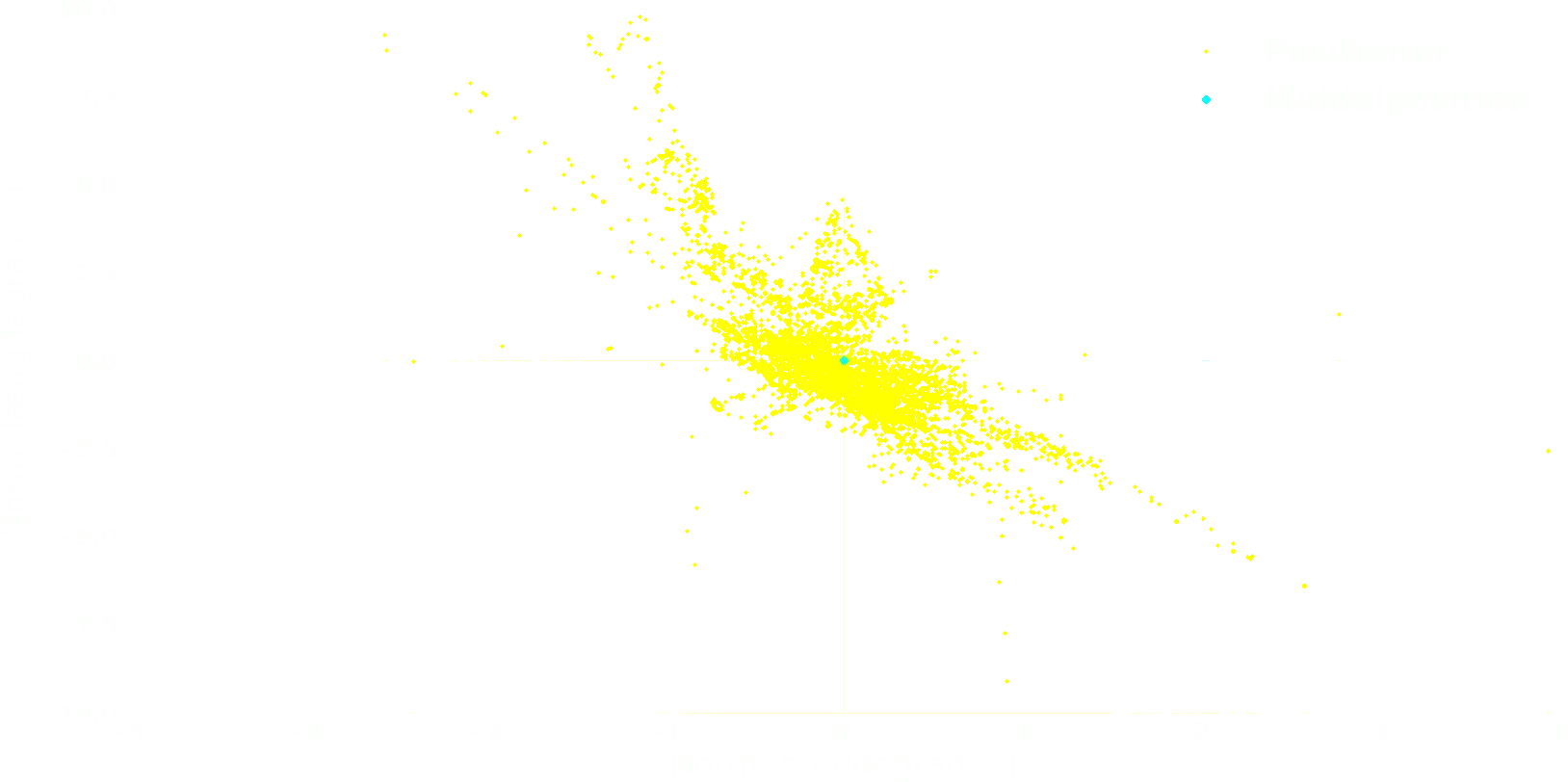
Measured GPS signal (yellow) over the course of 12 hours normalised to the mean.
The signal clearly varies more on the longitude (vertical axis) which is likely because of the orientation of the box as it was placed against a wall approximately parallel to the latitudal axis. The GPS needs a decent line of sight to multiple satellites, and satellites are generally unobstructed once they’ve passed over the building/horizon.
What did I learn?
- Analysing complex problems with complicated directives and layers of institutions
- Formulating concrete and problem-relevant specifications for a solution
- Choosing and interfacing with electronic components. An understanding for serial communication, UART and SPI.
- More knowledge of C, in particular wrt. structures.
- How GPS works, what the GPS signals look like and what accuracy can be expected.
- To not put a thermal resistor into water heated by an induction oven. Don’t ask how this occured.
As mentioned, the project was mostly about the soft science part of engineering. I remember wanting to just do electronics and I had to be bugged down by all this researching regarding the current situation, its actors and so on. Looking back at I do see the necessity as I don’t think I would’ve had such a rigorous approach to problem-solving as I do now without it.
Published 1. June 2023
Last modified 1. June 2023